視頻介紹
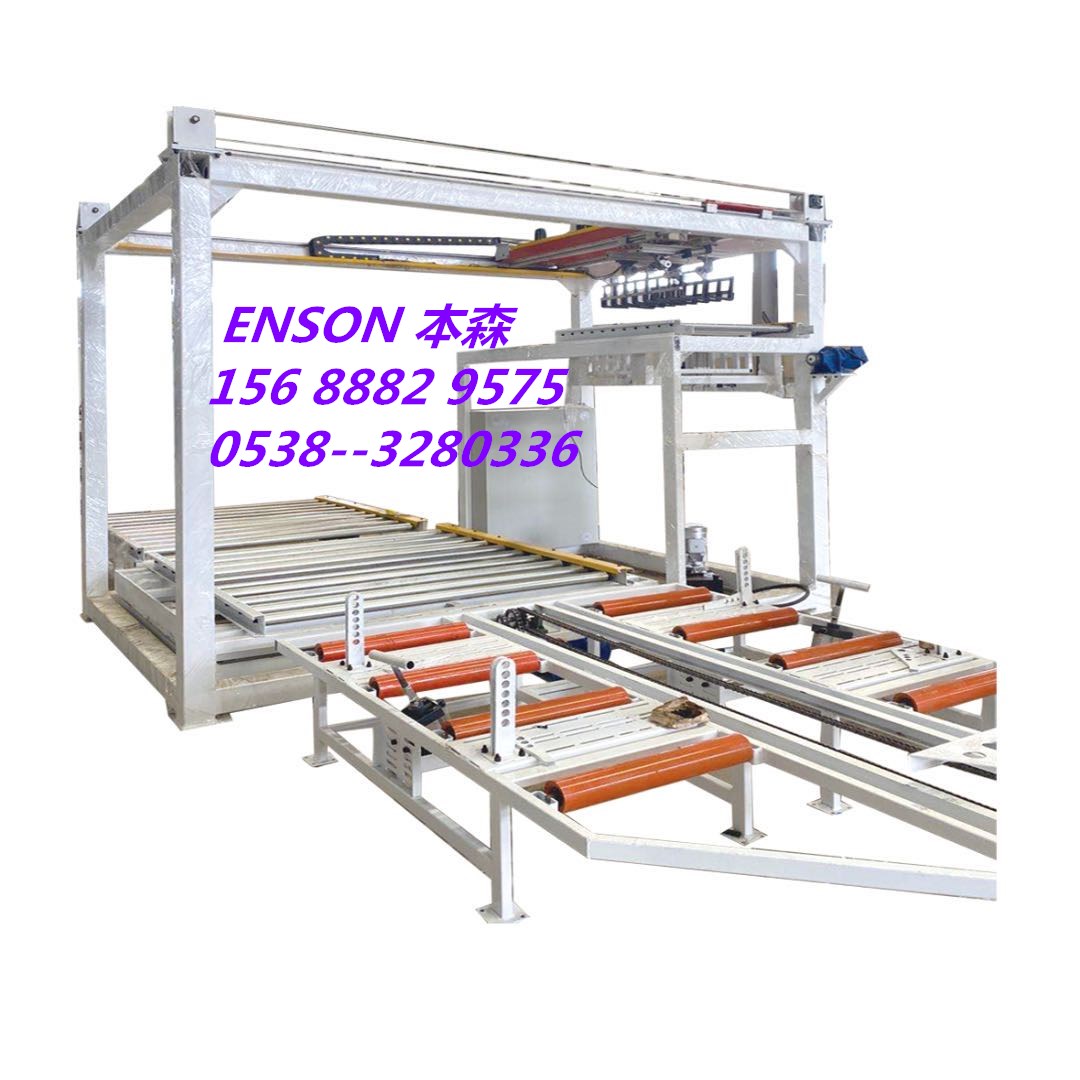
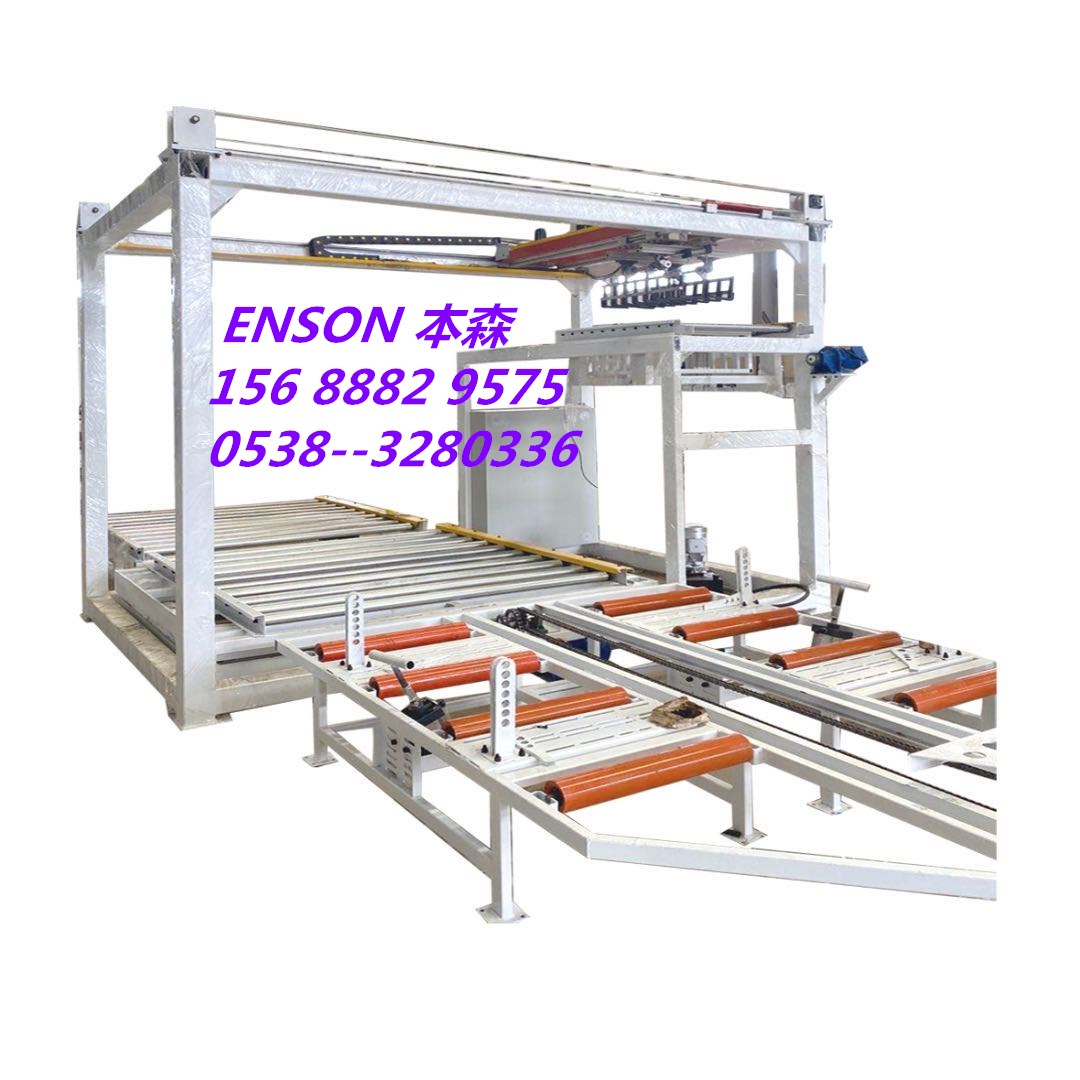
生物質(zhì)燃料顆粒碼垛立柱搬運(yùn)機(jī)械手是一種集成了機(jī)械、電子、傳感器、計算機(jī)和自動控制等多種技術(shù)的先進(jìn)設(shè)備。它主要用于將生物質(zhì)燃料顆粒(如秸稈、木屑等制成的顆粒)從生產(chǎn)線上的輸送帶或儲存區(qū)域搬運(yùn)到指定的碼垛位置,并按照預(yù)設(shè)的碼垛模式和層數(shù)進(jìn)行整齊堆放。
工作原理
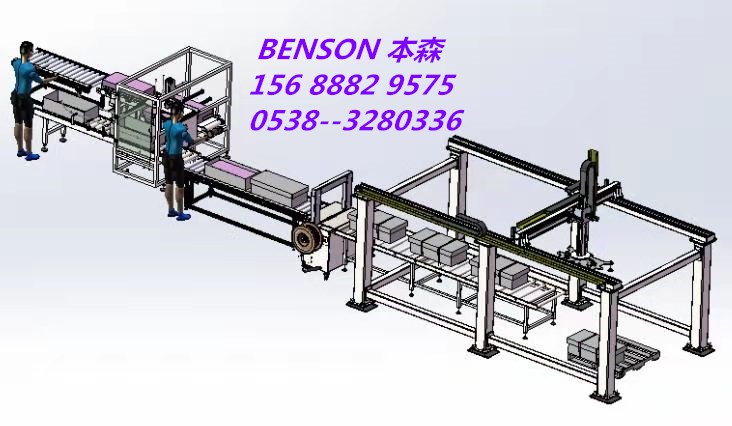
該機(jī)械手的工作原理主要基于點(diǎn)位到點(diǎn)位的直線插補(bǔ)運(yùn)動。通過機(jī)器人控制系統(tǒng),機(jī)械手能夠精確地實現(xiàn)各個軸(如X軸、Y軸、Z軸)的協(xié)同運(yùn)動,從而完成從抓取到碼放的整個過程。具體來說,當(dāng)物料(生物質(zhì)燃料顆粒包裝袋)被輸送到指定位置后,機(jī)械手通過各軸配合,將夾具運(yùn)行至物料定位的正上方。當(dāng)物料定位信號發(fā)出時,夾具通過伺服電機(jī)控制運(yùn)動向下,夾起物料后,再將其運(yùn)至碼垛位上方,使物料到達(dá)放置點(diǎn),然后將物料碼入指定位置。重復(fù)以上動作,直到完成整托碼垛。
生物質(zhì)燃料顆粒碼垛立柱搬運(yùn)機(jī)械手廣泛應(yīng)用于生物質(zhì)燃料生產(chǎn)行業(yè),如秸稈燃料顆粒、木屑燃料顆粒等的碼垛作業(yè)。此外,該機(jī)械手還可用于其他需要自動化碼垛的場合,如化工、建材、食品等行業(yè)的物料搬運(yùn)和碼垛。